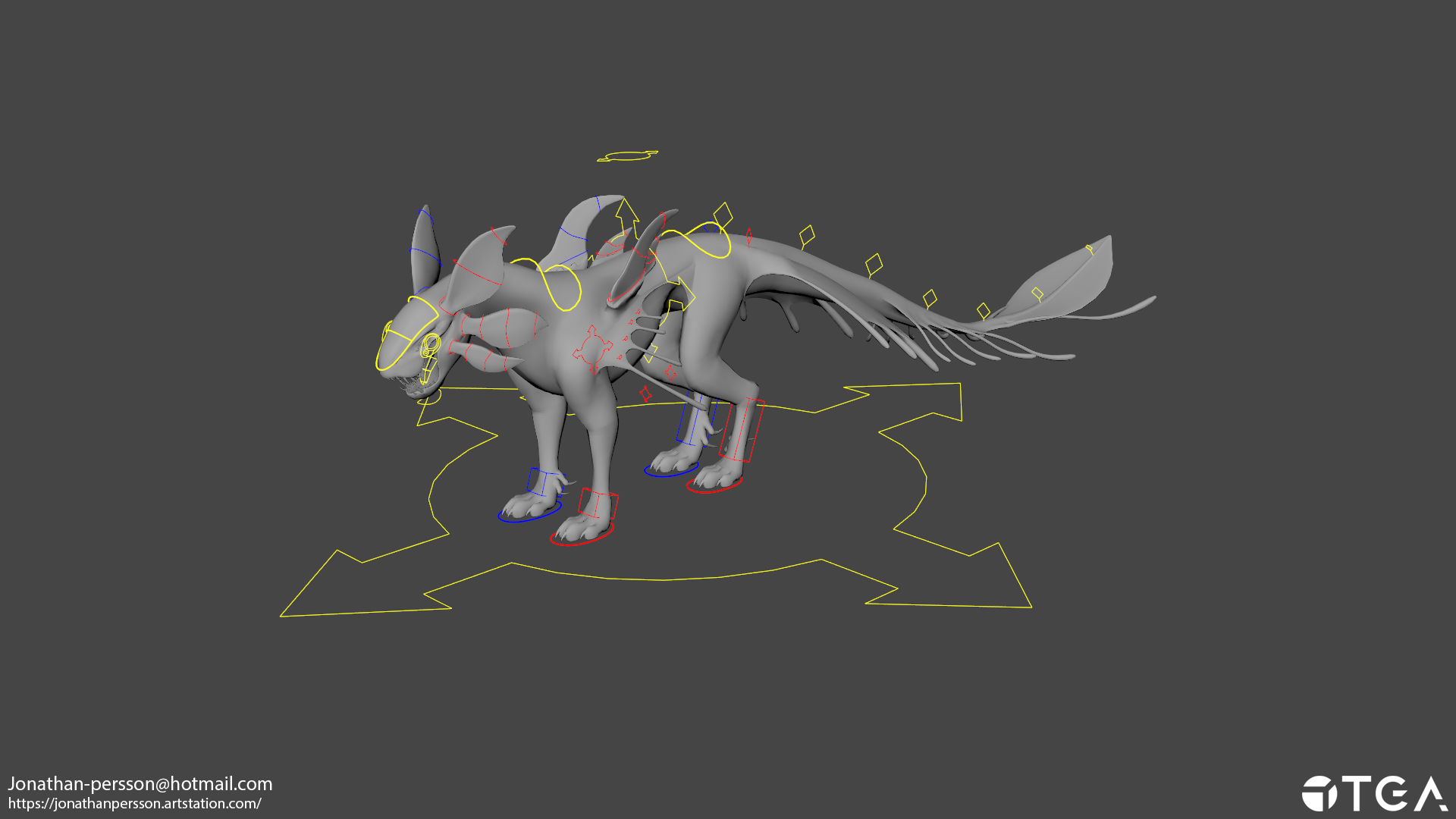
Quadruped rig
This model is base on a concept from Silana Cadou and modelled by Fredrik Appelholm.
I wanted to try to rig a four legged animal/creature and luckily for me Fredrik had plans to modell one. My goal was to learn new techniques and grow as a rigger.
The back is made with ribbon solution where the follicles drive the joints for a smooth deformation paired with a couple of FK controls to move with. The neck is basicly the same but with an IK solution insted so the user can move the head and the neck just follows.
The legs have IK to the heel and an "heel-offset" driven my an attribute that blends the angle between the foot-space and a set position parented under the hip/torso-controller. On the front leg there is an shoulder joint attached that aims to a set point above the back for a natural looking shoulder blade deformation. All the "fin"-looking things are simple FK solutions made easy with my rigging-toolset script to speed up the process.
Foot-space/hip-space switch on the back leg. Same technique in used on the front leg to. The fix group of the controller is aim constraind to two locators, one in foot-space and one in hip-space that i can alter between via a attribute.
This is the shoulder moving in conjunction with the foot.
This is a ribbon rig solution, the start is attached to the hip control and the end is attached to the shoulder control. This solution is built with a NURBS surface that is skinned to 3 joint. The surface has a hair system attached to it but only the follicles are used to drive the joints.
There is also a 4-part FK solution that drives the 3 ribbon joints the make arching the back an easier task for the user.

Render by Fredrik Appelholm. Can also be seen animated in Jacob Brodins reel.